ГЛАВНАЯ СТРАНИЦА
машины
МАШИНЫ
НОВОСТИ
контакты
SP-l | Робот манипулятор для машин непрерывного действия
Schemat działania
Opis maszyny
Produkty
Layout
Zakres formatowy
Galeria
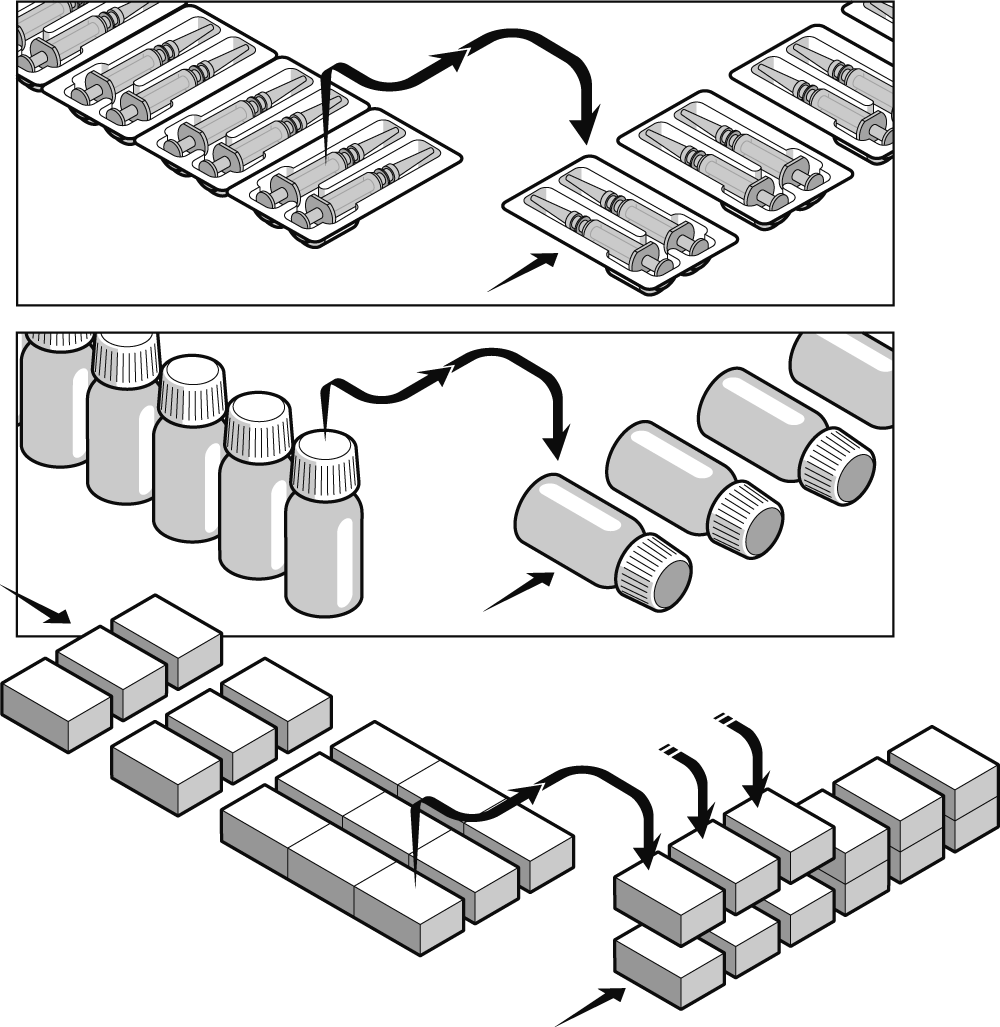
ПРИНЦИП РАБОТЫ МАШИНЫ
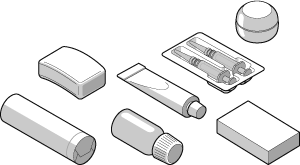
УПАКОВАННЫЙ ПРОДУКТ
СХЕМА РАЗМЕЩЕНИЯ МАШИНЫ
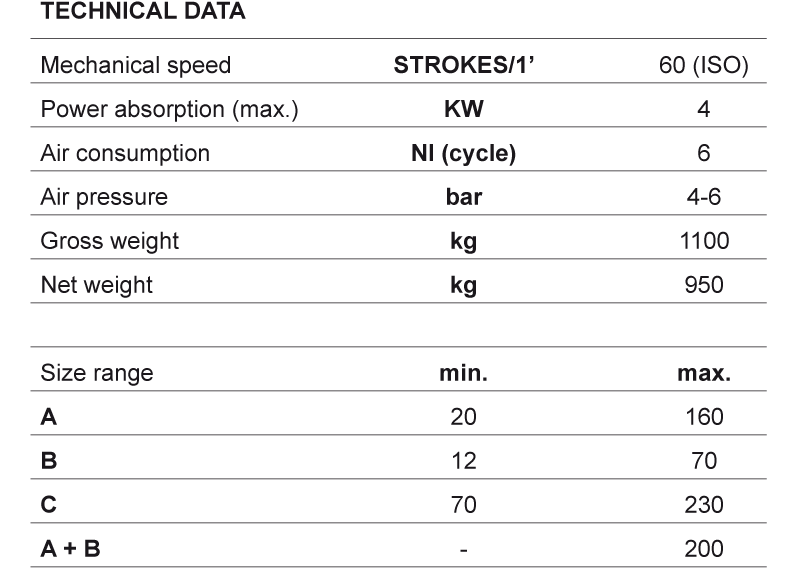
ДИАПАЗОН РАЗМЕРОВ