SP-l | maszyna robot manipulator o ruchu ciągłym

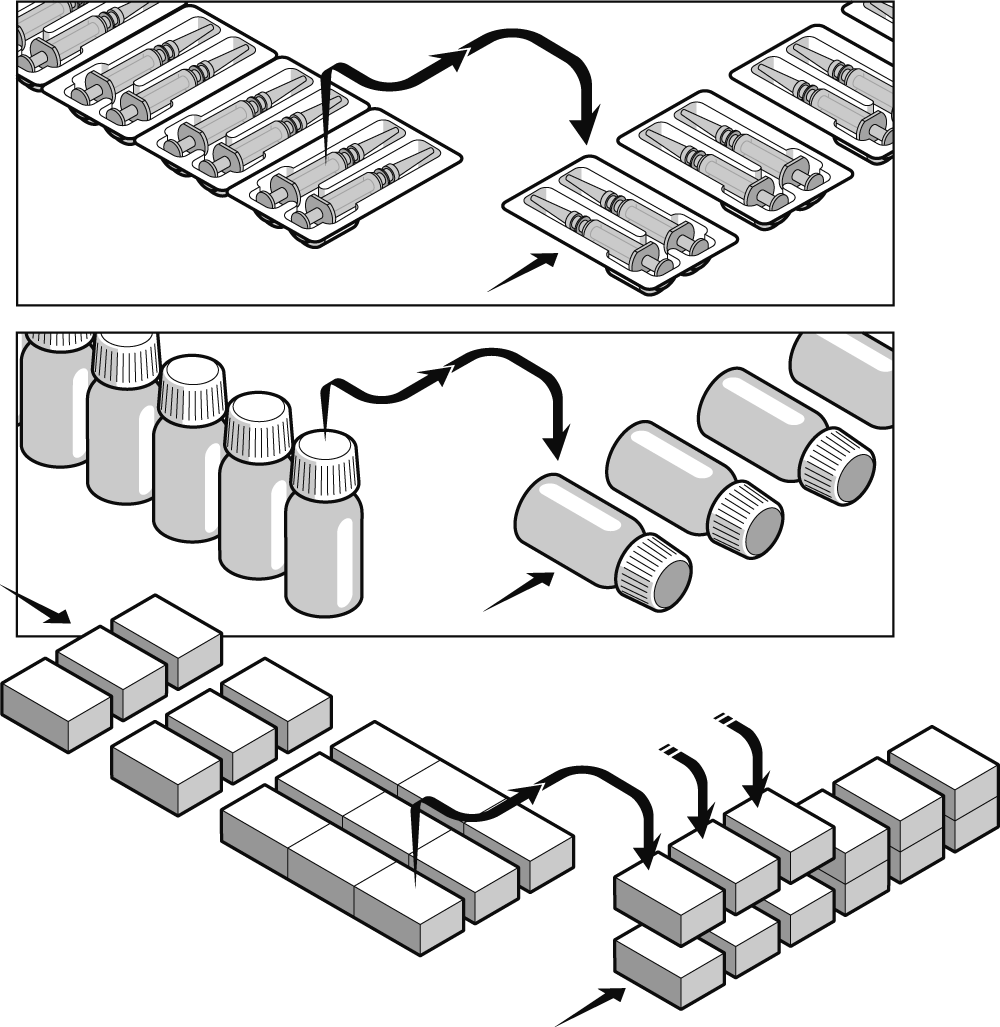
Schemat działania
Opis maszyny
SP-L to manipulator robotyczny pracujący w ruchu ciągłym, przeznaczony do pobierania i odkładania produktów bez zatrzymywania przepływu na linii produkcyjnej. Urządzenie wykorzystywane jest w aplikacjach, gdzie kluczowe znaczenie ma utrzymanie wysokiej wydajności oraz płynności transportu produktów.
W przeciwieństwie do systemów taktowych, manipulator SP-L synchronizuje swoje ruchy bezpośrednio z prędkością przenośnika, co pozwala na pobieranie produktów „w ruchu”. Oznacza to brak konieczności zatrzymywania produktu w strefie roboczej, co przekłada się na zwiększenie wydajności całej linii.
System wyposażony jest w układ śledzenia produktu, który na bieżąco identyfikuje jego pozycję i umożliwia precyzyjne dopasowanie trajektorii ruchu manipulatora. Dzięki temu możliwe jest dokładne pobieranie nawet przy dużych prędkościach transportu oraz przy zmiennym rozstawie produktów.
Manipulator może być wyposażony w różne typy głowic chwytających, w zależności od aplikacji, w tym przyssawki, chwytaki mechaniczne lub rozwiązania dedykowane. Pozwala to na obsługę zarówno produktów jednostkowych, jak i ich grup, niezależnie od kształtu czy charakterystyki powierzchni.
SP-L znajduje zastosowanie w operacjach takich jak szybkie grupowanie, załadunek do opakowań zbiorczych, transfer między przenośnikami czy integracja z kartoniarkami i systemami pakowania. Dzięki pracy w ruchu ciągłym stanowi rozwiązanie dedykowane dla linii o wysokiej wydajności, gdzie ograniczenie przestojów i płynność procesu mają kluczowe znaczenie.
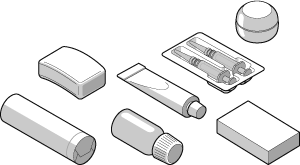
Produkty
layout

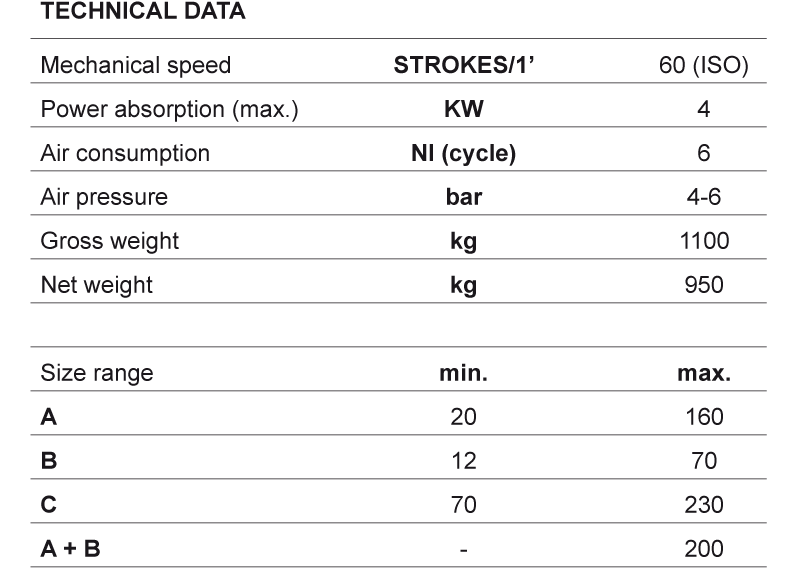
zakres formatowy maszyny