SP | maszyna robot manipulator o ruchu taktowym

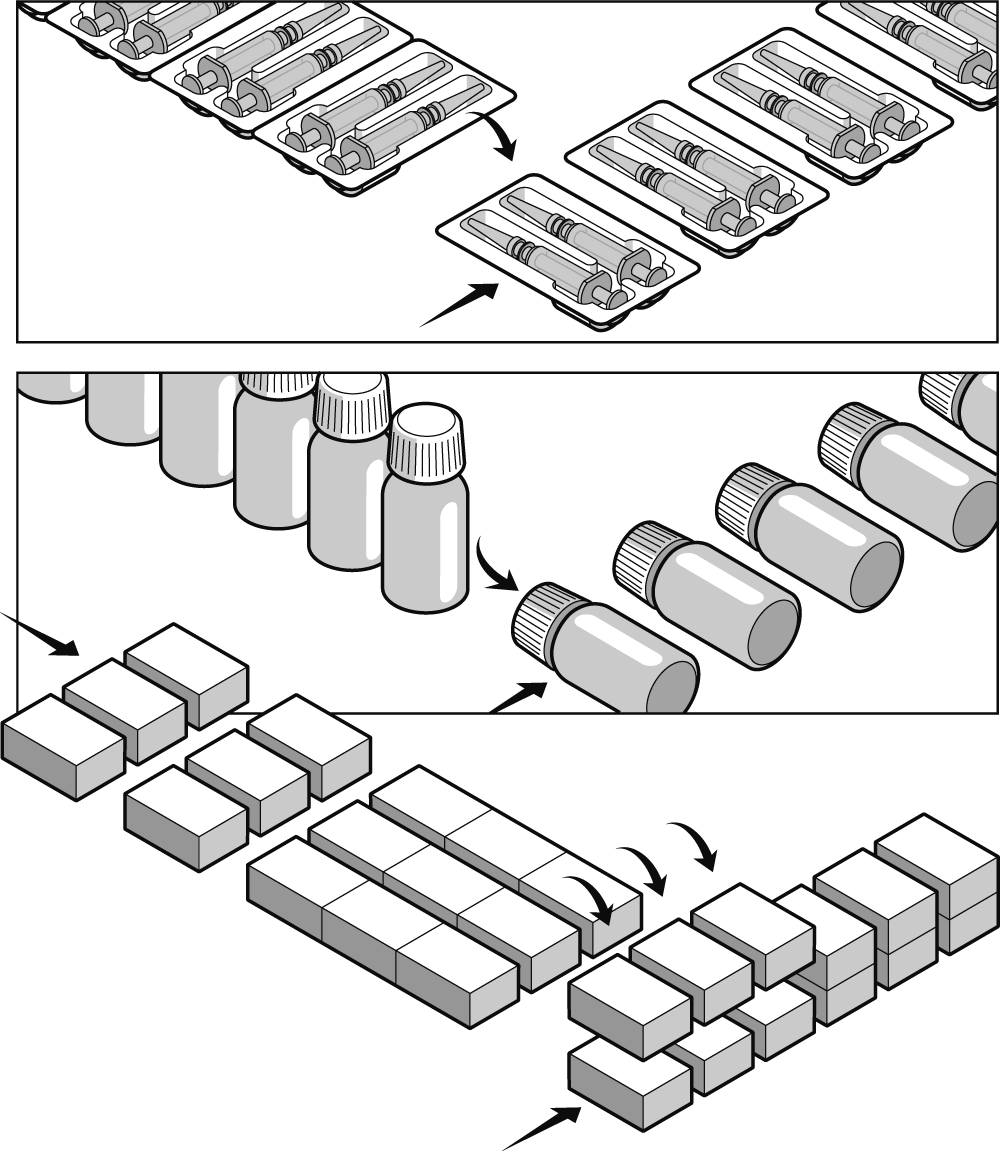
Schemat działania
Opis maszyny
SP to manipulator robotyczny o ruchu taktowym, przeznaczony do automatycznego pobierania, przemieszczania i odkładania produktów w liniach pakujących. Urządzenie stosowane jest jako element integrujący pomiędzy kolejnymi etapami procesu, w szczególności w aplikacjach wymagających precyzyjnego pozycjonowania produktów.
Praca maszyny realizowana jest w cyklu taktowym, zsynchronizowanym z pozostałymi urządzeniami linii technologicznej. W każdym cyklu manipulator pobiera produkt lub grupę produktów z określonego miejsca, a następnie przenosi je do wyznaczonej pozycji, na przykład do kartonu, tacki lub kolejnego przenośnika.
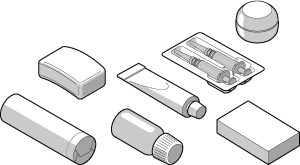
System chwytający dobierany jest w zależności od rodzaju produktu i może być realizowany przy użyciu przyssawek, chwytaków mechanicznych lub rozwiązań dedykowanych. Pozwala to na obsługę szerokiego zakresu produktów o różnych kształtach, wymiarach i właściwościach powierzchni.
Ruch manipulatora kontrolowany jest w sposób precyzyjny, co umożliwia zachowanie powtarzalności cyklu oraz stabilności procesu nawet przy wysokich prędkościach pracy. Układ może być konfigurowany w zależności od wymagań aplikacji, w tym liczby punktów odkładania oraz sposobu grupowania produktów.
Manipulator SP stosowany jest najczęściej w operacjach typu pick&place, grupowaniu produktów, załadunku kartonów oraz integracji z systemami pakowania zbiorczego, gdzie kluczowe znaczenie ma synchronizacja ruchów i dokładność pozycjonowania.
Produkty
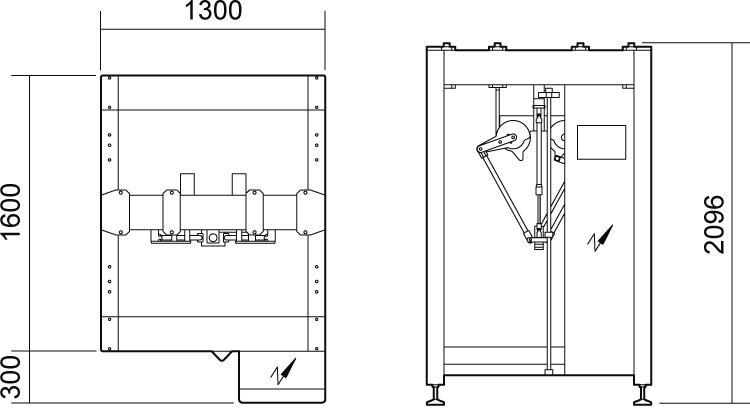
layout
zakres formatowy maszyny

